
目前风电机组是怎么实现最大风功率追踪和变桨距控制的?
2019-03-25分类:风电产业 / 风电技术来源:阅读数:(
)
【CPEM吉瓦风电网讯】
作者:WindEnergy
链接:https://www.zhihu.com/question/52474638/answer/143390800
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
现在风电机组主控策略很多文献和书籍都有讲解,主要的策略切换在额定(转速)点,分为额定以下风能最大追踪运行和额定以上恒功率运行。说明一下,入流风速是不能准确预测的,实际控制是机组的转速(不考虑会有先进的风速前馈策略的厂家)。
额定以下可以遵照:执行,其中
。
通常来说,额定以下不会加入过多的变桨动作(不考虑最优桨距角控制)。
额定以上:变桨控制是为了稳定转速(稳定功率),使用PI控制器(不考虑先进控制策略)对转速的超调进行修正,。
简单的,发电机转速超过额定转速进行变桨动作稳定转速,不超过额定转速不进行变桨。
具体的操作,涉及的控制策略实施,状态切换,细节很多,不详细说明。
这些内容在很多书籍都有描述,推荐 叶杭冶 的风电机组控制,具体书名不记得了,比较有借鉴意义,从国外而来,国内外长期运行实践(独立变桨和先进策略可以理论学习)。
补充1:
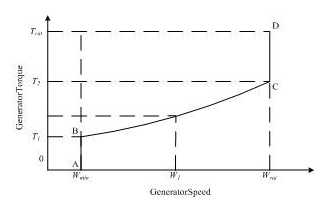
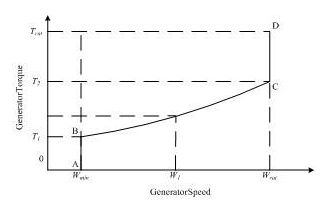
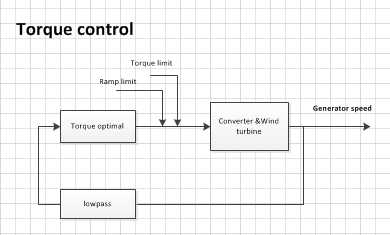
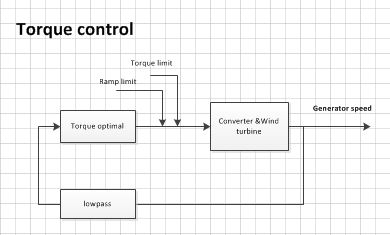
1)第一个图来自网络,论文和书籍中很常见的转速转矩特性曲线,我们说的在BC段。第二个图是自己以前画的图,做了简化(去掉额定转速运行,去掉功率环)。
在正文里说的策略是根据转速计算最优转矩(即有功功率参考值)。这是一种基础方法,还有一种就是查表法,也有文献使用追踪最优的叶尖速比。(可以多看一些文献,但策略的具体实施细节很多,需要一个好的平台作为支持)
2)变桨的基本作用就是稳定额定转速,和额定功率(不讨论实际策略)。PI控制器利用的是信号差值进行误差调节,信号差值(转速环或功率环)进入PI后的输出是一个调节量,具体量纲是根据设计定义的,可以是变桨位置(桨距角),也可以是变桨速率(正负方向最终结果也是角度的变化),这里的参考值只是主控计算给出的,后级变桨机构执行不讨论。
(来源:知乎)
分享到:
上一篇:精细化设计助力风电竞价上网
相关文章
- 新型塔架技术,国内首台陆上7MW风机现世06-09
- 双馈风力发电机的结构讲解06-09
- 一文了解风电轴承基础知识06-09
- 基于逐台调整的风电场有功功率控制系统及方法06-07
- ENFAST打破国外垄断,走通风机设计、测试、运行整条路06-07
- 适用15+MW海上风机!这款浮式基础向全尺寸阶段迈进06-06
- 风电变流器简介06-02
- PPT | 风电机组变桨控制系统介绍06-01
- 海上大叶片技术05-31
- 埃米南科技首次采用复合制作技术完成海洋平台模型试验一体化制作05-31
编辑推荐
- 全球第一台两叶片漂浮式风机的诞...05-22
- 碳纤维复合材料在风电叶片主梁的...03-11
- 风力发电运营风险及评估要点简述03-07
- 谷歌发电“黑科技”——“发电风...02-14
- 新型永磁技术-怒海中的超导风力...01-29
- 抗台风、破冰冻、防腐蚀.....海...01-21
- 风机基础大体积混凝土浇筑施工要...01-21
- 风力发电机叶片颤振概述01-21
- 干货丨风力发电机组寿命分析01-21
- 从国网2018年“十八项反措”看风...01-21
最新发布
- 新型塔架技术,国内首台陆上...06-09
- 双馈风力发电机的结构讲解06-09
- 一文了解风电轴承基础知识06-09
- 基于逐台调整的风电场有功功率控...06-07
- ENFAST打破国外垄断,走通风机设...06-07
- 适用15+MW海上风机!这款浮式基...06-06
- 风电变流器简介06-02
- PPT | 风电机组变桨控制系统介绍06-01
- 海上大叶片技术05-31
- 埃米南科技首次采用复合制作技术...05-31