
案例 | 转矩控制器误差过大故障处理
2022-05-26分类:风电运维 / 风电运维来源:协和运维阅读数:(
)
【CPEM吉瓦风电网讯】
前言
风电场OPEX(运营期费用支出)主要由计划性维护(例如资产管理、输变电设备维护、机组定检维护)和非计划性维护(例如故障维护、备件消耗、大部件更换)两大类工作所引发的成本构成。据WoodMackenzie研究显示,亚太地区陆上风电由故障导致的非计划性维护占运维总成本的比例接近75%,并且随着设备运行年限的增加该比例仍将持续攀升。
因此,要降低风电场OPEX,最有效的途径即通过提升故障一次性修复率来降低故障频次、减少不必要的备件消耗,同时基于状态维护有效降低大部件更换成本。而目前市场上大多数运维服务提供的是“以件换件”式的故障维护,而并非以找到故障根源为出发点,导致备件消耗量大,人员反复出工,人员数量配置无法精简,因此人工成本也居高不下。“不会修”“修不好”“成本高”成为降低OPEX费用的几大拦路虎。
好的运维服务是以核心技术带来关键指标的提升,从而从整体上降低风电场运营成本。作为新能源领域专业的技术服务公司,协合运维始终站在业主的视角,通过专业的数据分析找到故障根因,做到出工前对故障机理了然于胸,出工后“药到病除”,有效降低故障维修时长——“会修”,提高一次性修复率从而降低故障频次——“修得好”,减少备件消耗和人员出工率——“降成本”。以技术支撑专业服务,为电站全生命周期运营带来降本增效的核心价值。
自2022年4月起,协合运维特别推出“故障案例集”系列,与行业分享15年来积累的规模化运维的技术与经验,希望为行业同仁处理类似故障问题提供参考。“予人玫瑰,手有余香”,让经验流动,让技术真正为行业创造价值。
案例:转矩控制器误差过大故障处理
某风电场一台2.1MW双馈风电机组,在一段时间内频繁报转矩控制器误差过大故障,风电机组可以自复位运行。在多次故障后,风电场小伙伴对此台机组进行了全面检查,发现联轴器滑动,更换联轴器后(不好换,联轴器很重),机组恢复运行。过了一段时间后该机组又随机性报出转矩控制器误差过大故障,检查发现联轴器再次滑动。根据以往经验,怀疑编码器故障,对编码器进行了多次更换,故障依旧,又对编码器与变频器的连接电缆进行了多次校线,未见异常。因为故障是偶尔随机性报出,没有规律性,此过程持续将近一年多。维修陷入困境,最后通过以下 “四步打法”有效解决。
01取出故障时刻的数据
该机型故障时,主控和变频器都会记录故障时刻的数据,首先导出该机组最近一次故障的数据。
02针对逻辑时序,对故障点进行定性分析
转矩控制器误差过大故障的逻辑是:
当主控给定的转矩值与变频器反馈的转矩值误差超过额定转矩的30%时,故障报出。该机组额定容量为2.1MW,额定转速为1800r/min,经过计算该机组额定转矩为:
T=9550P/n=2100*9550/1800=11142N·m
30%的额定转矩为:
T*30%=3343N·m
即当主控给定的转矩值与变频器反馈的转矩值误差超过3343N·m时,机组就会报转矩控制器误差过大故障。
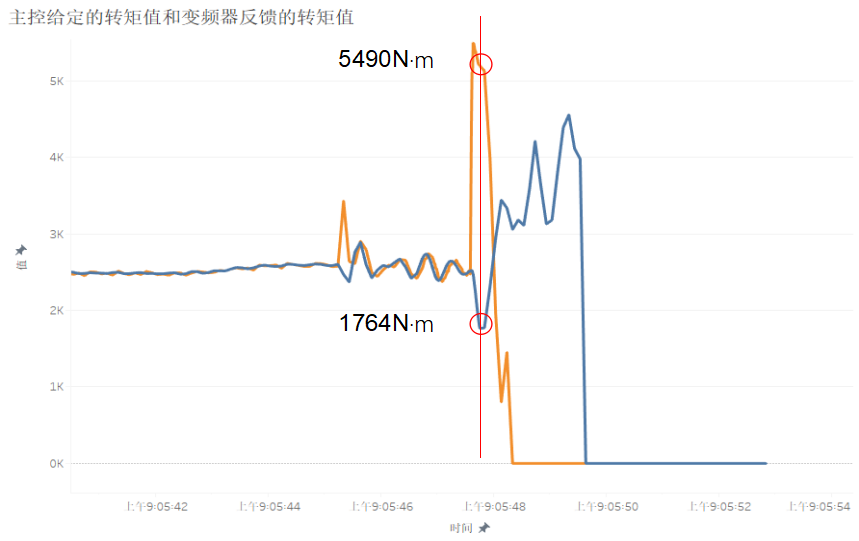
主控给定的转矩值和变频器反馈的转矩值波形图
根据波形可以看到在9:05:48时刻,主控给定的转矩值为1764N·m 变频器反馈的转矩值为5490N·m,两者误差3726N·m,达到故障触发值3343N·m,故障触发报出。

变频器控制原理图
根据变频器控制原理可知,变频器反馈的转矩图片与转子电流图片、定子电流图片、定子电压图片、编码器角度图片等变量相关。将上述变量绘制波形图。
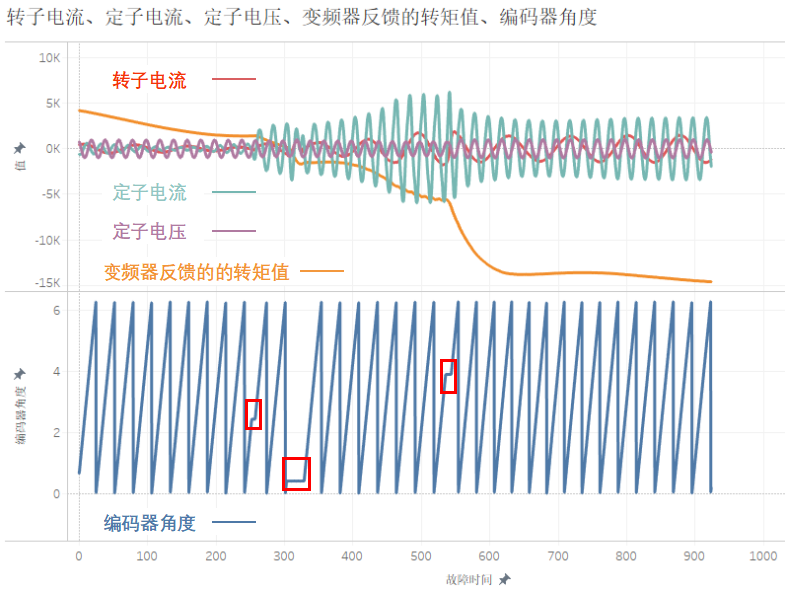
编码器角度等相关变量波形图
通过上图,我们初步发现编码器角度图片出现异常。关于编码器角度的计量我们先来了解一下编码器工作原理,编码器角度值是通过计数器累计编码器码盘上光栅数得到的。
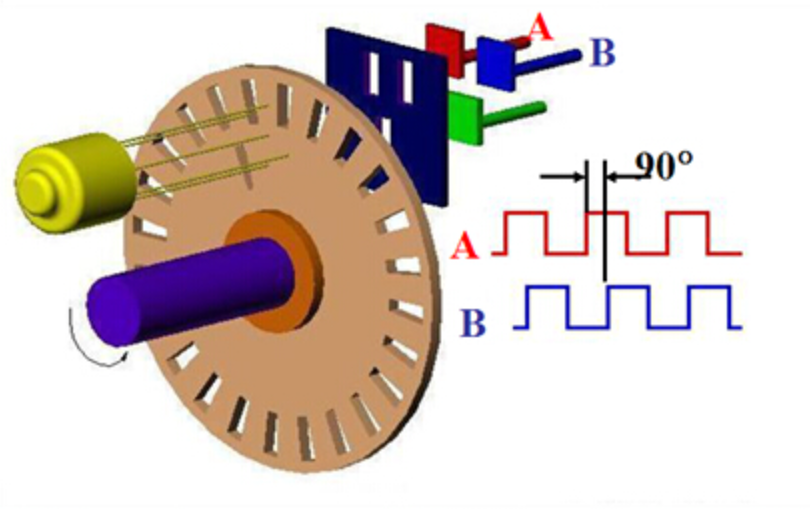
编码器原理图
例如某编码器码盘上有1024个光栅,则码盘旋转一圈累计会1024个脉冲,计数器在接收到1024个脉冲后代表编码器旋转360°(2π)。然后重新开始计数,一直循环。
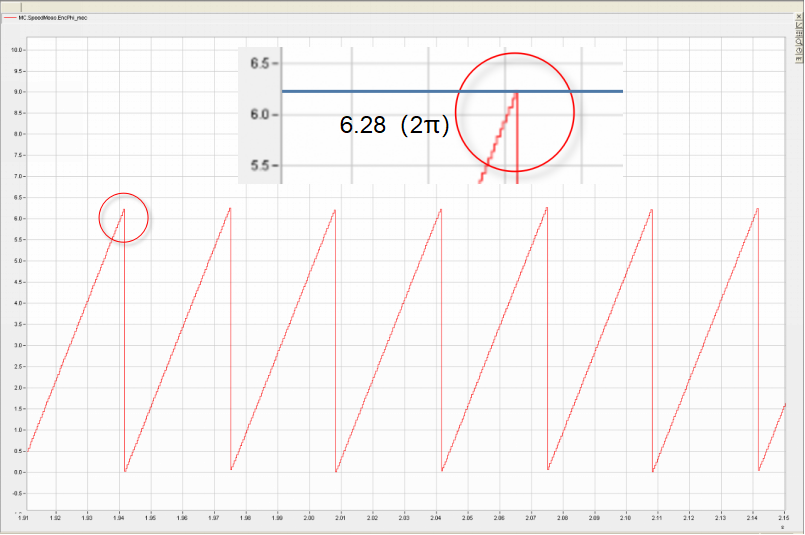
编码器角度正常波形
而角度测量是通过积分计算图片图片得来,所以只要有脉冲数丢失,编码器测量的角度就会发生变化。
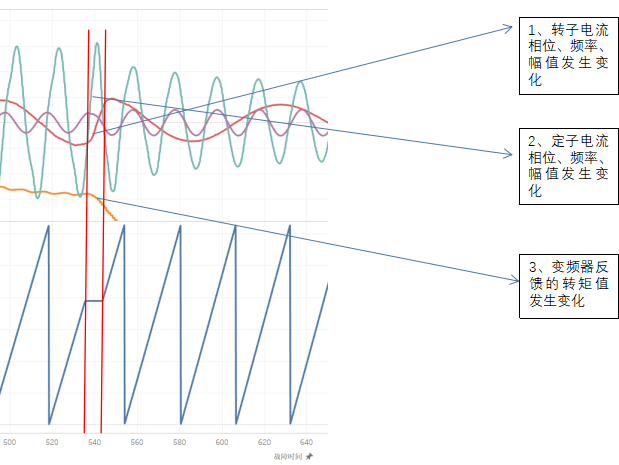
通过与正常角度波形对比,根据原理,可定性为编码器脉冲丢失。将编码器角度、定子电流、转子电流、变频器反馈转矩、定子电压相关数据波形,进行对时分析,从宏观上可以发现当编码器角度发生异常时,转子电流增大、定子电流增大、变频器反馈转矩急剧变化。

编码器角度等相关变量波形图
从微观上进行分析:
第一时刻编码器角度变化:
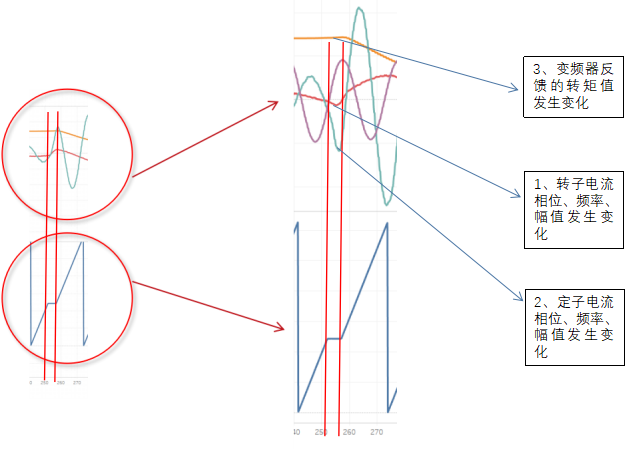
第二时刻编码器角度变化:

第三时刻编码器角度变化:
通过上述微观波形分析,可知当编码器角度脉冲丢失时,首先是转子电流相位、频率、幅值发生变化,然后定子电流相位、频率、幅值发生变化,导致变频器反馈的转矩值发生变化,当与主控给定的转矩值偏差大于设定值时故障报出。
编码器角度脉冲丢失导致变频器反馈转矩发生大的波动,具体原理如下:
根据2r/2s旋转变换公式可知,在(电网电压角度)不变的情况下,编码器角度发生变化。
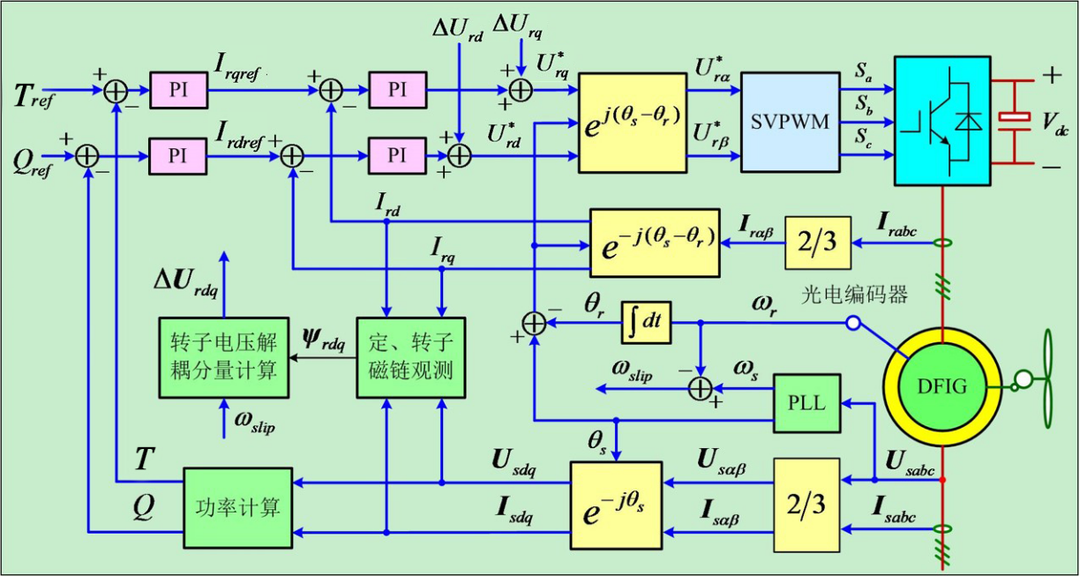
变频器控制原理图

引起机侧变频器开关脉冲量变化,最终引起转子电流相位、频率、幅值发生变化。根据双馈电机等效原理图可知转子电流的变化,会导致转子磁链发生变化,从而影响定子感应电势图片发生变化,继而导致定子电流的相位、频率、幅值都发生变化,定子电流变化,定子功率就发生了变化,最终导致变频器反馈转矩的大小和方向发生变化。
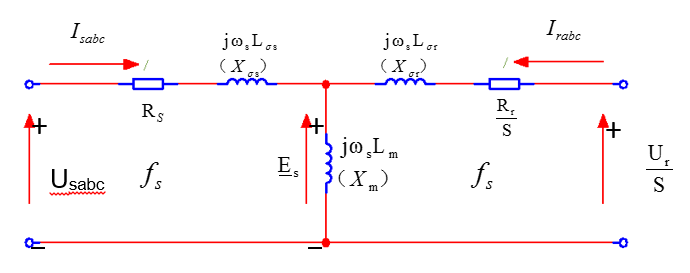
双馈电机等效原理图
故障时刻的逻辑时序如下:
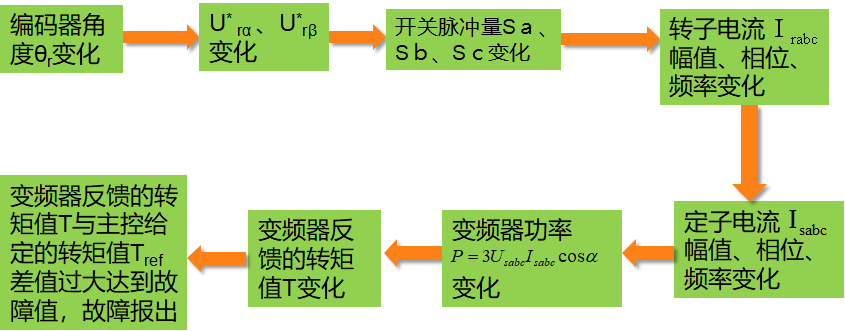
逻辑时序图
03对照数学关系故障点进行定量分析
通过变频器的控制原理图可知,在2r/2s旋转变换之后,到转子电流的输出,中间没有控制环节,这一阶段属于不可控阶段,所以无法进行定量计算。
04对照图纸和设备实物,精准确定故障点
根据上述分析可知,故障点就是编码器角度跳变,因为现场已更换过多次编码器,即可排除编码器本身问题,根据波形图发现编码器角度是瞬时跳变,故怀疑是编码器与变频器的连接电缆的问题,但已经对电缆进行了多次校线,未发现问题。故判断是连接电缆虚断,这与故障随机性报出也是吻合的,由于电缆太长(塔上至塔下),虚断点不好排查,对电缆外观检查未发现问题。对电缆进行了更换,更换后故障再未报出,故障恢复。
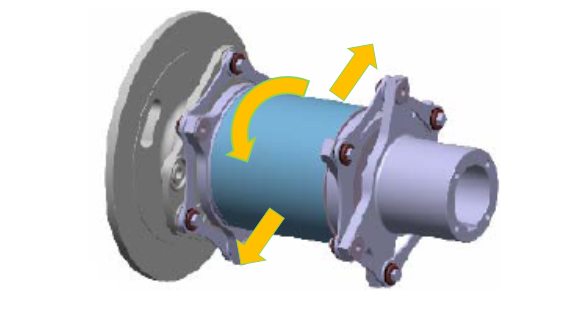
导致联轴器滑动损坏的原因是:机组运行时变频器的反馈转矩与风轮的驱动转矩方向相反,互为平衡,当变频器的反馈转矩,经常性发生毫秒级的突变,而风轮的驱动转矩由于风轮转动惯量的影响,不会发生毫秒级的突变,这种突变会导致联轴器发生疲劳损伤,最终造成联轴器滑动损坏。
分享到:
相关文章
- 现役“孤儿”风机病无所医,如何精准纾困?06-17
- 水面无人艇助力海上风电勘测和运维进入智能时代06-13
- 双跨深度赋能|“大风车”智慧运维,转出低碳新动能!06-10
- “AMOS+标准化运维”破局快速增长下的新能源电站运营痛点06-09
- 风电安装船+风电运维船,均实现关键节点06-08
- 风机给船充电,“零碳排”运维关键一步!06-06
- 风电机组变桨系统典型故障与维修06-02
- 6台1.5MW双馈机组技改交付一周年现状05-31
- 福建省发文:针对风机倒塌、起重吊装事故05-30
- 奥林巴斯仪器——风电领域的守护者05-27
编辑推荐
- 海上风电+(无人机、AI、VR……...03-13
- 干货丨风电场架空集电线路地线技...03-07
- 维斯塔斯多叶轮概念机功成退休01-21
- 海上风电运维面临哪些挑战?又该...01-21
- 2018年中国风能太阳能资源年景公...01-21
- 干货丨风电场架空集电线路地线技...01-21
- 解困风电“后市场”01-21
- 一图详解风机的秘密01-11
最新发布
- 现役“孤儿”风机病无所医,如何...06-17
- 水面无人艇助力海上风电勘测和运...06-13
- 双跨深度赋能|“大风车”智慧运...06-10
- “AMOS+标准化运维”破局快速增...06-09
- 风电安装船+风电运维船,均实现...06-08
- 风机给船充电,“零碳排”运维关...06-06
- 风电机组变桨系统典型故障与维修06-02
- 6台1.5MW双馈机组技改交付一周年...05-31
- 福建省发文:针对风机倒塌、起重...05-30
- 奥林巴斯仪器——风电领域的守护...05-27